Bien, ya obtuve resultados.
En primer medida almacené 33 valores del Timer cuando detecto el falling edge, luego hago un pequeño análisis en excel para ver el tiempo entre señal. Veo que necesito algunos pulsos mas y empiezo a almacenar 35 FE. El resultado es este:
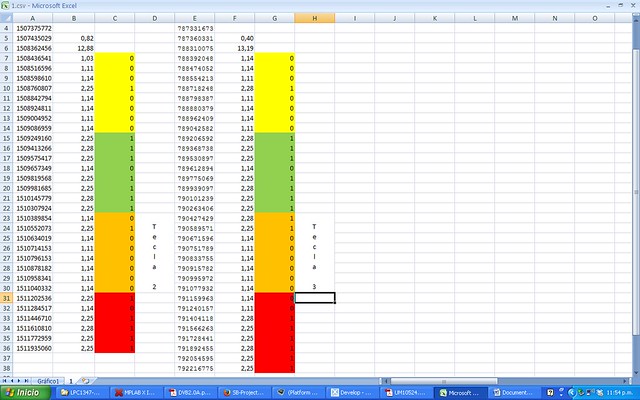
Como primer medida veo que aparece un "falso pulso" de entre 800 y 400useg al principio del pulso inicial. Eso no figura en el protocolo de NEC, pero metí el osciloscopio y pude comprobar que hay un pequeño pulso adicional.
Como segunda medida, vemos que los datos estan perfectos, tenemos la direccion y su complemento que para cualquier tecla será la misma.
Luego tenemos el código de la tecla en si, que por lo que veo, para las teclas numerícas coincide el codigo de comando con el número de tecla.
Tambien podemos notar que hay pequeñas diferencias entre pulsos largos y entre pulsos cortos. Pero básicamente esta muy fácil de procesar en el micro la info para obtener el código de la tecla.
Acomodo un poco el soft y subo novedades.
Saludos!


